Page Not Found
Page not found. Your pixels are in another canvas.

A list of all the posts and pages found on the site. For you robots out there is an XML version available for digesting as well.
Page not found. Your pixels are in another canvas.
About me
Courses from educational institutions and participation in MOOC
Published:
This blog post is about my design work while I graduated after my Bachelor’s degree from MANIT, Bhopal until I joined Airbus on behalf of L&T Technology Services. There are many mechanical parts and assemblies I designed in Creo Parametric software, learned from the CADD center. After joining Airbus, I started using CATIA V5 software for mechanical components design and product management. There are many CAD assemblies that I completed as a hobby or interest in design. Moreover, I have accomplished some Computational Fluid Dynamics (CFD) simulation for microturbine. You can find my work in the publication section. If you want to learn more about my simulation work, please contact me via email.
Published:
Coming Soon with crazy ideas.
Proportional (P), Proportional-Integral (PI) and Model Predictive Controls (MPC) algorithms are implemented in the ego vehicle.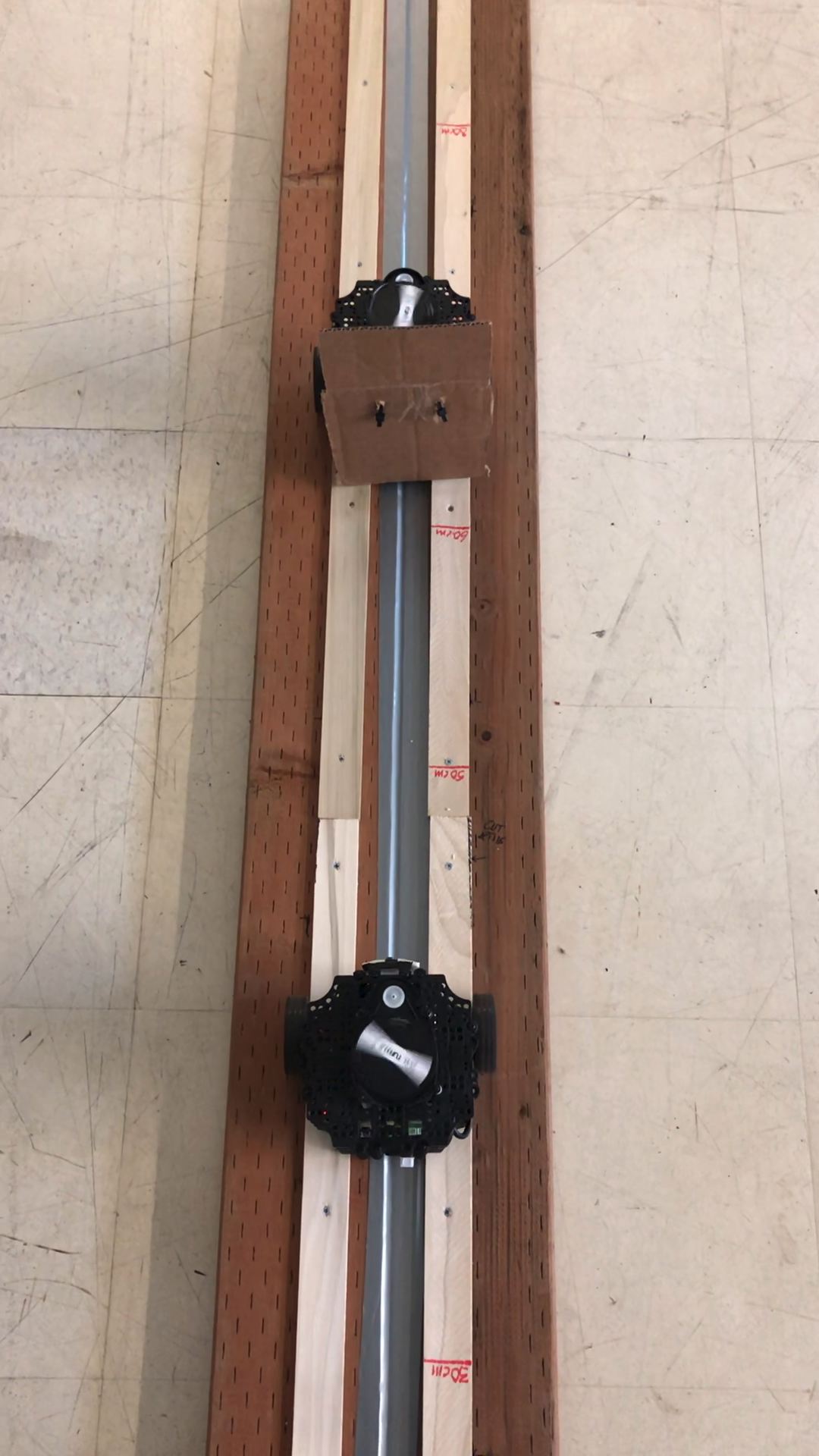
The ego robot maintains the safe relative distance between the robot.
Solving Gridworld problems with Q-learning process.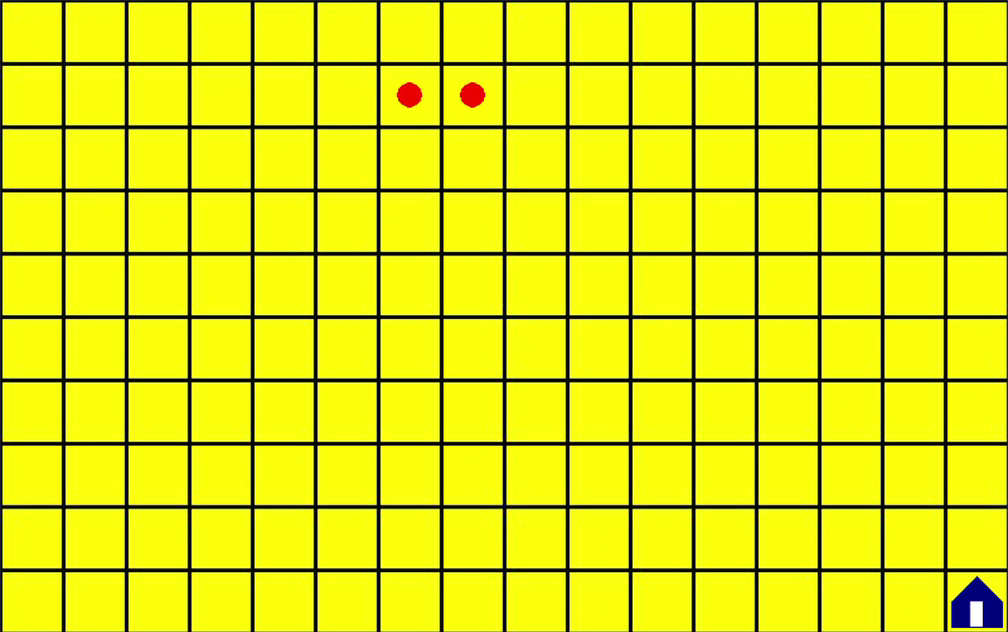
Gridworld environment for the project.
Stabilizing movement of Quadrotor through pose estimation.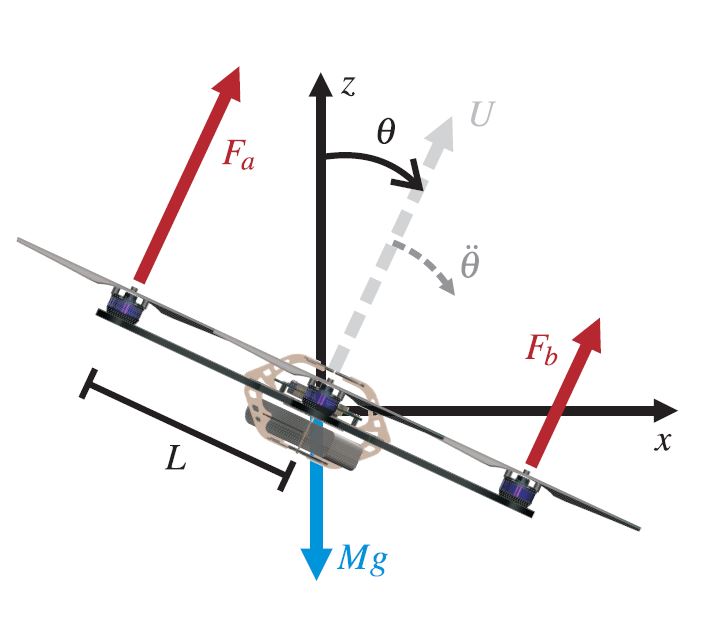
Coordinate system and forces of the 2D quadrocopter model by Lupashin S. et. al.
Stabilizing movement of single wheel robot.
The Ballbot mechanical structure by University of Alcala.
Picking and placing different objects by recognising them.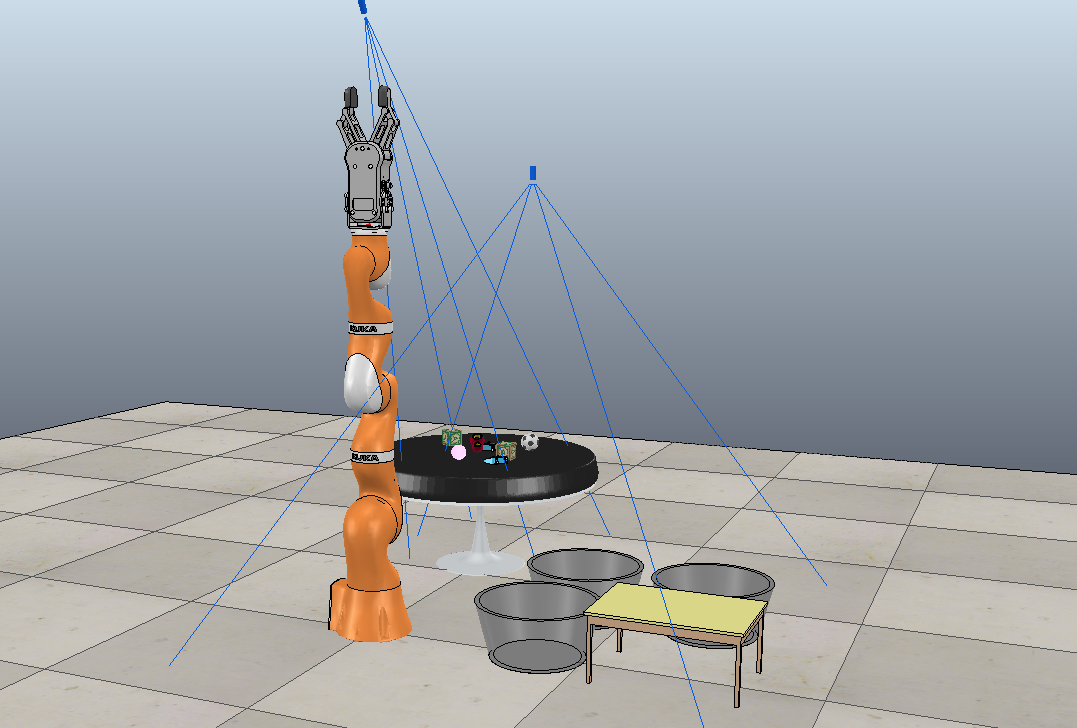
Robotic arm environment with vision sensor attached in ceiling.
Published in Journal of Sustainable Manufacturing and Renewable Energy 3, 2015
This paper is about the performance analysis of an microturbine which we developed to scavange the waste energy through compressed exhaust gas and generate electricity. This was the initial iteration product of an impulse microturbine. This had efficiency of 4 to 5 percent. After so many iterations in design, its efficiency would increase and can be use as a small portable energy generating device.
Recommended citation: A Saraf, A Sungra, R Gupta (2015). "PERFORMANCE ANALYSIS OF AN AIR OPERATED MICROTURBINE." Journal of Sustainable Manufacturing and Renewable Energy 3. (1/2), 129-138. https://www.novapublishers.com/catalog/product_info.php?products_id=54069
Published in Department of Mechanical Engineering, University of Washington, Seattle, 2019
In this research, the following (ego) vehicle was maintaining a safe relative distance by varying the velocity through different controllers to catch up with the lead vehicle. Two major sensors were used, a rotating Laser Distance Sensor (LDS) and an RGB camera sensor. The camera sensor operated as a secondary system and was used to improve the detection probability of the lead vehicle. A sensor fusion algorithm was used for localizing the ego vehicle which includes a detection clustering algorithm and a Kalman filter to estimate the relative distance between the two vehicles. The sensors were calibrated for the test conditions to obtain detections with in feasible limits. Different controllers such as Proportional, Proportional-Integral, and Model Predictive Control were implemented and validated both in simulation and experiment on the turtlebot3-burger robot.
Recommended citation: Sungra, Anshul (2019). "Different control strategies for Mobile Robots. " http://hdl.handle.net/1773/45224
Published in ASME 2020 International Mechanical Engineering Congress and Exposition (IMECE2020), 2020
This paper describes the implementation of various algorithms to control the distance between a lead vehicle and a following (ego) vehicle. The ego robot equipped with a monocular camera and a rotating laser sensor(LDS). The outputs of the camera and laser sensor(LDS) were fused to obtain accurate distance measurements for the lead vehicle. Kalman Filter was used to implementing sensor fusion by combining perception data from the monocular camera and LDS for accurate position and velocity estimation. The results show that the Model Predictive Control (MPC) yields faster response times when compared to Proportional (P) control and Proportional-Integral (PI) control. These algorithms evaluated during constant velocity and constant acceleration of the lead vehicle.
Recommended citation: A Sungra, B Fabien (2020). "EVALUATION OF CONTROL ALGORITHMS ON MOBILE ROBOTS FOR COLLISION AVOIDANCE." ASME 2020 International Mechanical Engineering Congress and Exposition (IMECE2020). https://asme.pinetec.com/imece2020/
Published:
This is a description of your talk, which is a markdown files that can be all markdown-ified like any other post. Yay markdown!
Published:
This is a description of your conference proceedings talk, note the different field in type. You can put anything in this field.
Undergraduate course, University 1, Department, 2014
This is a description of a teaching experience. You can use markdown like any other post.
Workshop, University 1, Department, 2015
This is a description of a teaching experience. You can use markdown like any other post.