Different Control Strategies for Mobile Robots
Proportional (P), Proportional-Integral (PI) and Model Predictive Controls (MPC) algorithms are implemented in the ego vehicle.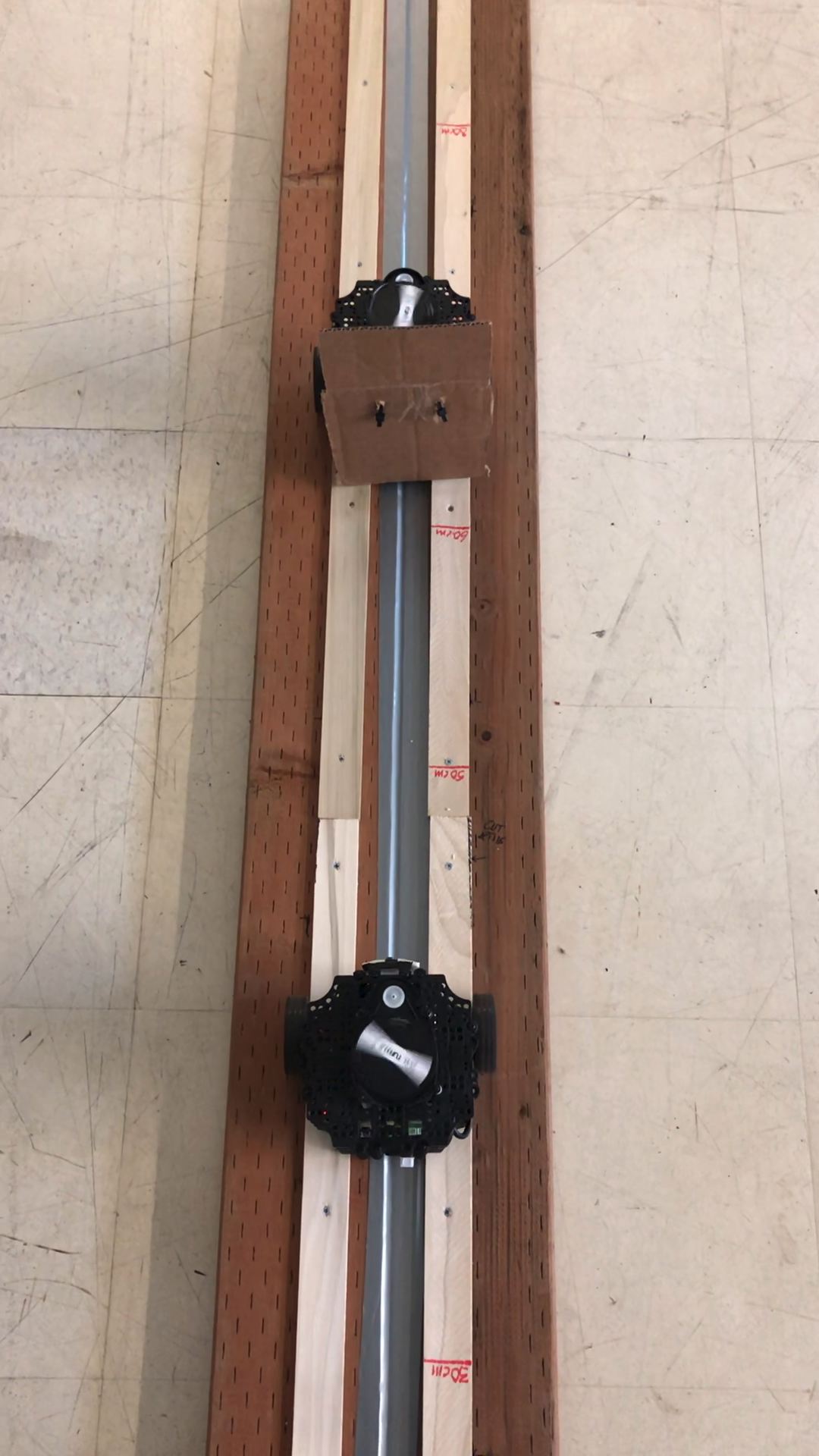
The ego robot maintains the safe relative distance between the robot.

Proportional (P), Proportional-Integral (PI) and Model Predictive Controls (MPC) algorithms are implemented in the ego vehicle.
The ego robot maintains the safe relative distance between the robot.
Solving Gridworld problems with Q-learning process.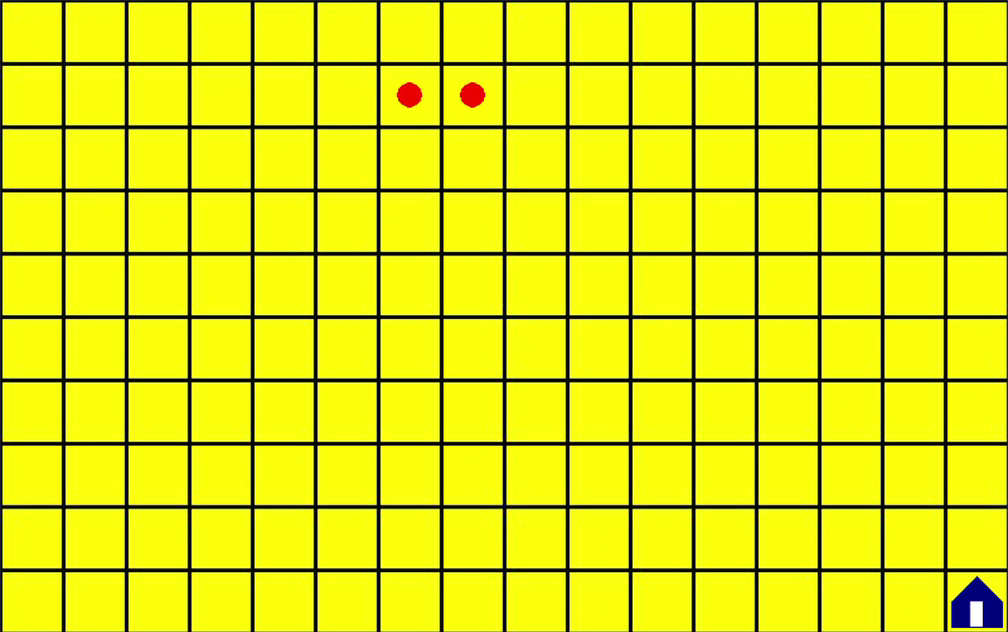
Gridworld environment for the project.
Stabilizing movement of Quadrotor through pose estimation.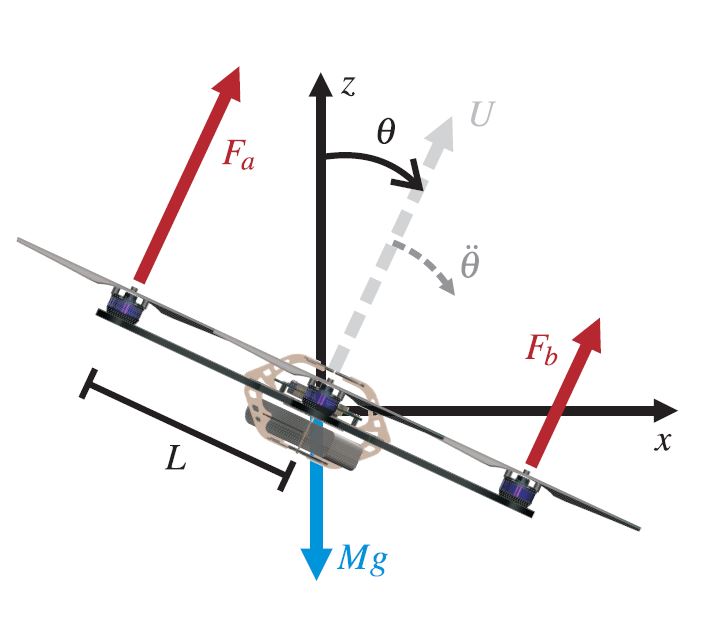
Coordinate system and forces of the 2D quadrocopter model by Lupashin S. et. al.
Stabilizing movement of single wheel robot.
The Ballbot mechanical structure by University of Alcala.
Picking and placing different objects by recognising them.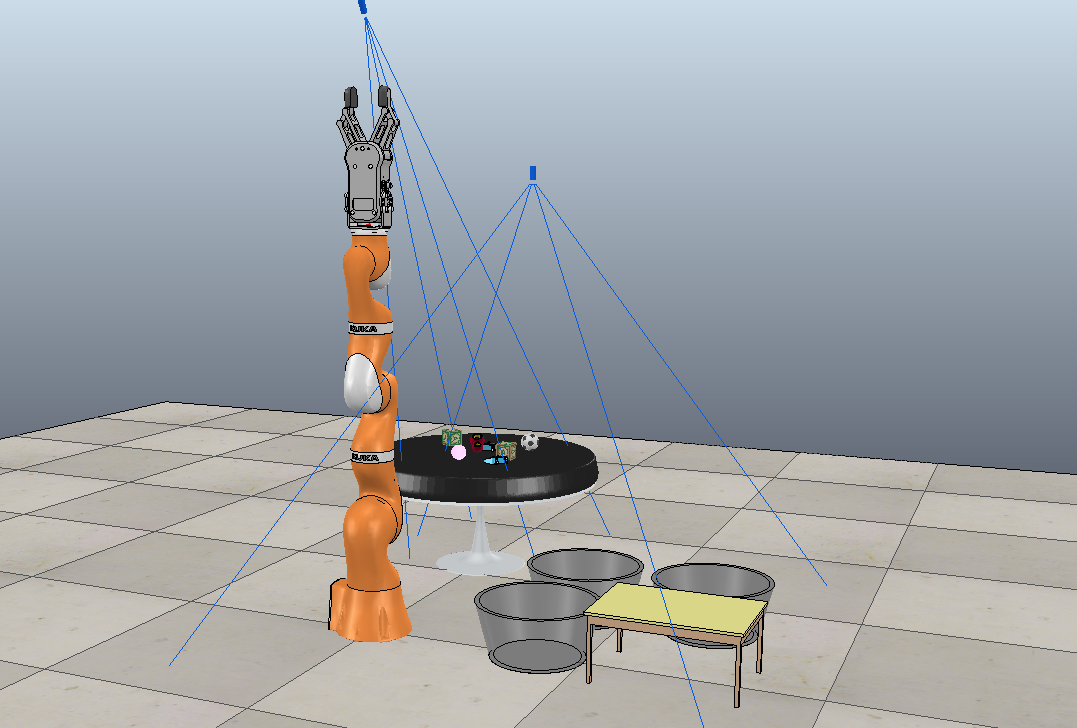
Robotic arm environment with vision sensor attached in ceiling.